[ ](https://git.lurenaud.com/lurenaud/VolvoRTI)
# VolvoRTI — Android Auto Retrofit for Volvo RTI
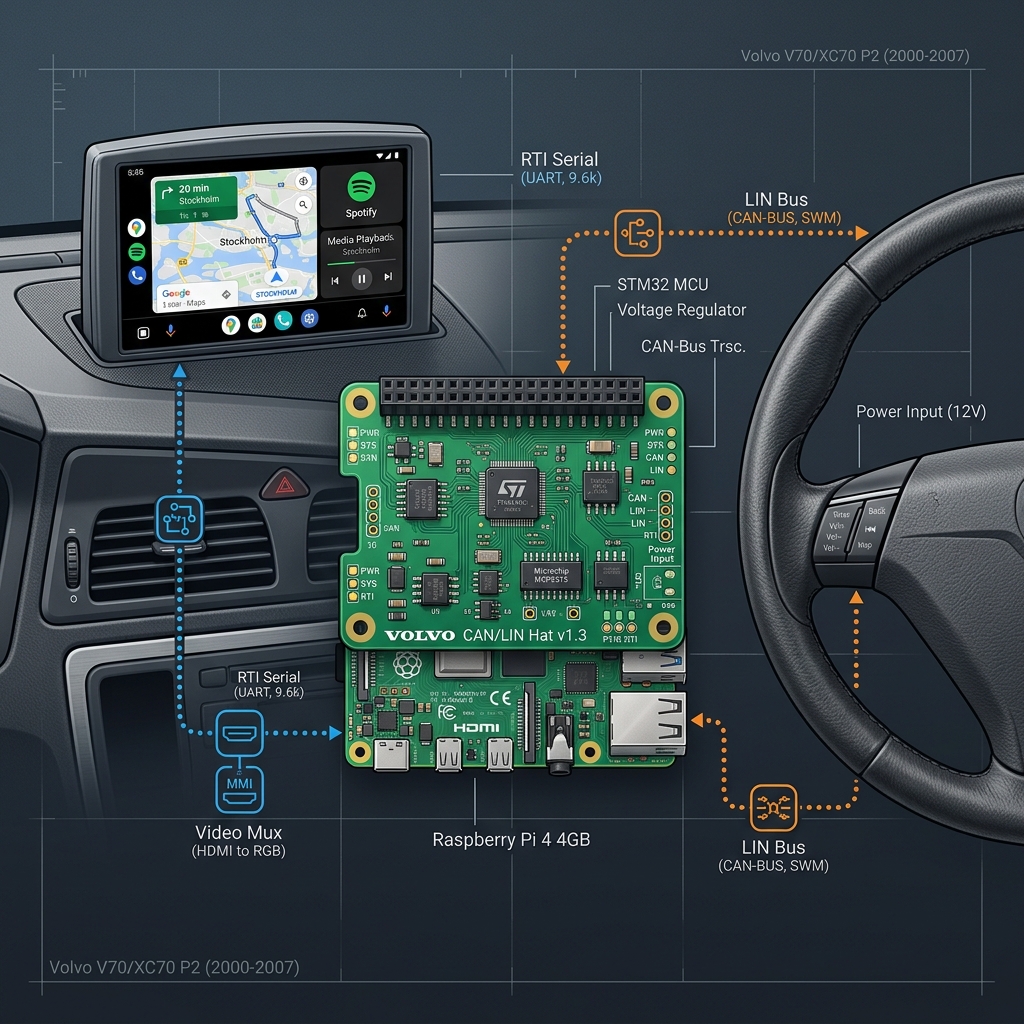
An integrated Android Auto retrofit system for the retracting Volvo Road and Traffic Information (RTI) navigation screen. Using a Raspberry Pi 4, custom microcontrollers, custom PCB routing, and 3D-printed mechanical enclosures, this project aims to replace the legacy navigation unit with a modern infotainment hub running LineageOS (Android).
> [!WARNING]
> **Status:** This setup faces display quality limitations when driving the original Volvo LCD screen directly due to its low resolution (typically 400x234). Replacing the internal screen panel with a high-resolution LCD while retaining the retractable motor housing is highly recommended.
---
## 🛠️ System Architecture
The retrofit consists of three key layers working in unison: **vehicle bus integration (LIN)**, **screen power/command control (RTI Serial)**, and the **core computer (Raspberry Pi 4)**.
```mermaid
graph TD
%% Vehicles Inputs
SWM[Steering Wheel Module - LIN Bus] -- "LIN Frame ID 0x20" --> ATtiny[ATtiny84 Steering Controller]
CEM[Central Electronic Module - LIN] -- "LIN Keep-Alive Ping" --> ATtiny
%% ATtiny Processing
ATtiny -- "RC-6 MCE IR Protocol (Bit-banged)" --> Pi_IR[Raspberry Pi GPIO 24 / IR Input]
%% Pi Processing
subgraph Raspberry Pi 4 [Raspberry Pi 4 - LineageOS]
Pi_IR --> KM[KeyMapper / Input Dispatcher]
KM -- "Volume Up Trigger > 5s LIN Idle" --> SD[OS Shutdown Command]
Hotspot[Init Services] -- "Auto-start on Boot" --> AP[Wi-Fi AP: VolvoC70_AndroidAuto]
end
%% Screen Control
ATmega[Arduino Screen Controller] -- "2400 Baud Serial Control" --> Screen[Volvo RTI Retractable Screen]
Pi_Video[Raspberry Pi HDMI] -- "VGA / RGBS Video Signal" --> VideoMux[Video Mux] --> Screen
classDef hardware fill:#f9f,stroke:#333,stroke-width:2px;
classDef software fill:#bbf,stroke:#333,stroke-width:2px;
class SWM,CEM,ATtiny,ATmega,Screen,VideoMux hardware;
class KM,SD,Hotspot,AP software;
```
---
## 📁 Repository Structure
* 📁 **`Arduino/`**: Microcontroller firmware written for the Arduino ecosystem.
* `LIN_to_IR/`: Decodes Steering Wheel Module (SWM) buttons from the LIN bus and outputs RC-6 Mode 6A IR commands to control Android. Monitors LIN inactivity to signal shutdown.
* `RTI_Control/`: Drives the serial protocol of the Volvo retractable screen, sending commands to raise the screen, set brightness, and keep it active.
* `IR_remote_test/`: Test firmware for verifying RC-6 IR signal generation.
* 📁 **`Kicad/`**: Schematic, PCB layout, footprints, and Gerber files for a custom Raspberry Pi shield designed to host the MCP2004 LIN transceiver, video muxing, and power routing.
* 📁 **`CAD/`**: SolidWorks 3D CAD design files (`.SLDASM`, `.SLDPRT`) and 3D-printable `.STL` files for the custom mechanical Pi enclosure (`case_top` & `case_bottom`).
* 📁 **`Raspberry/`**: Configuration scripts and mapping files for LineageOS/Android, including custom `ir-keytable` mappings and key event hooks.
* 📁 **`Photos/`**: High-quality hardware builds, installation logs, and system diagrams.
---
## ⚙️ Detailed Module Breakdown
### 1. Steering Wheel Integration (`Arduino/LIN_to_IR`)
The **ATtiny84** intercepts steering wheel buttons from the Steering Wheel Module (SWM) on LIN frame `0x20`. These button actions are translated into bit-banged RC-6 Mode 6A (MCE Remote) signals and fed directly to the Raspberry Pi.
#### Button Map & Command Codes
When buttons are pressed, the ATtiny transmits the corresponding Microsoft MCE remote scancodes:
| Button | LIN Frame Trigger | Active Button Code | MCE Scancode | Action on LineageOS |
| :--- | :--- | :--- | :--- | :--- |
| **UP** | `d0 & 0x01` | `1` | `0x800f041e` | Navigate Up |
| **DOWN** | `d0 & 0x02` | `2` | `0x800f041f` | Navigate Down |
| **LEFT** | `d0 & 0x04` | `3` | `0x800f0420` | Navigate Left |
| **RIGHT** | `d0 & 0x08` | `4` | `0x800f0421` | Navigate Right |
| **ENTER** | `d1 & 0x08` | `5` | `0x800f0422` | Select / OK |
| **BACK** | `d1 & 0x01` | `6` | `0x800f0423` | Back / Exit |
| **Volume Up (Shutdown)** | LIN Silent > 5s | `7` | `0x800f0410` | Trigger Soft Shutdown |
#### Smart Power-down (Car-Off Detection)
To avoid battery drain, the system implements automated shutdown:
* The ATtiny monitors LIN traffic. Since the car's Central Electronic Module (CEM) continuously polls the LIN bus when the ignition is on, active communication indicates the vehicle is running.
* If no LIN serial data is detected for **5 seconds**, the ATtiny assumes the car is off, changes state, and sends the MCE code `0x800f0410` (`KEY_VOLUMEUP`) 3 times to guarantee receipt.
* Android intercepts this key and shuts down cleanly via the command line (`reboot -p`).
---
### 2. Retractable Screen Serial Driver (`Arduino/RTI_Control`)
The Volvo RTI screen requires continuous serial commands at **2400 baud** over a single communication line to stay awake and raised. The screen controller script performs this keep-alive task.
* **Display Modes**: Configurable via display mode hex codes (RGB: `0x40`, PAL: `0x45`, NTSC: `0x4C`, Screen Off/Retract: `0x46`).
* **Brightness Control**: Employs a 16-level hex sequence (`0x20` to `0x2F` / `0x6E`) to adjust the backlighting dynamically.
---
### 3. Raspberry Pi Customization (`Raspberry`)
#### Key Event Remapping
To receive the direct-wired IR signal from the ATtiny, the Pi utilizes `ir-keytable` with a custom mapping profile:
* **Configuration File**: [`Raspberry/rc-rc6-mce.toml`](Raspberry/rc-rc6-mce.toml)
* **Command KeyMapper Setup**:
```bash
# Enable accessibility service for KeyMapper
adb shell settings put secure accessibility_enabled 1
adb shell settings put secure enabled_accessibility_services io.github.sds100.keymapper/.system.accessibility.MyAccessibilityService
# Map the Volume Up trigger to execute:
reboot -p
```
#### Wi-Fi Hotspot Auto-start at Boot
To establish wireless Android Auto on boot, a custom init script starts the Wi-Fi hotspot automatically on startup:
* **Boot script** (`/system/bin/start_hotspot.sh`):
```sh
#!/system/bin/sh
while [ "$(getprop sys.boot_completed)" != "1" ]; do
sleep 1
done
sleep 5
cmd wifi start-softap VolvoC70_AndroidAuto wpa2 123456789
```
* **Init configuration** (`/system/etc/init/start_hotspot.rc`):
```rc
service start_hotspot /system/bin/sh /system/bin/start_hotspot.sh
class main
user root
group root system wifi
oneshot
disabled
on property:sys.boot_completed=1
start start_hotspot
```
---
## 📷 Gallery & Renderings
### System Overview Diagram
### Prototype Hardware
](https://git.lurenaud.com/lurenaud/VolvoRTI)
# VolvoRTI — Android Auto Retrofit for Volvo RTI
An integrated Android Auto retrofit system for the retracting Volvo Road and Traffic Information (RTI) navigation screen. Using a Raspberry Pi 4, custom microcontrollers, custom PCB routing, and 3D-printed mechanical enclosures, this project aims to replace the legacy navigation unit with a modern infotainment hub running LineageOS (Android).
> [!WARNING]
> **Status:** This setup faces display quality limitations when driving the original Volvo LCD screen directly due to its low resolution (typically 400x234). Replacing the internal screen panel with a high-resolution LCD while retaining the retractable motor housing is highly recommended.
---
## 🛠️ System Architecture
The retrofit consists of three key layers working in unison: **vehicle bus integration (LIN)**, **screen power/command control (RTI Serial)**, and the **core computer (Raspberry Pi 4)**.
```mermaid
graph TD
%% Vehicles Inputs
SWM[Steering Wheel Module - LIN Bus] -- "LIN Frame ID 0x20" --> ATtiny[ATtiny84 Steering Controller]
CEM[Central Electronic Module - LIN] -- "LIN Keep-Alive Ping" --> ATtiny
%% ATtiny Processing
ATtiny -- "RC-6 MCE IR Protocol (Bit-banged)" --> Pi_IR[Raspberry Pi GPIO 24 / IR Input]
%% Pi Processing
subgraph Raspberry Pi 4 [Raspberry Pi 4 - LineageOS]
Pi_IR --> KM[KeyMapper / Input Dispatcher]
KM -- "Volume Up Trigger > 5s LIN Idle" --> SD[OS Shutdown Command]
Hotspot[Init Services] -- "Auto-start on Boot" --> AP[Wi-Fi AP: VolvoC70_AndroidAuto]
end
%% Screen Control
ATmega[Arduino Screen Controller] -- "2400 Baud Serial Control" --> Screen[Volvo RTI Retractable Screen]
Pi_Video[Raspberry Pi HDMI] -- "VGA / RGBS Video Signal" --> VideoMux[Video Mux] --> Screen
classDef hardware fill:#f9f,stroke:#333,stroke-width:2px;
classDef software fill:#bbf,stroke:#333,stroke-width:2px;
class SWM,CEM,ATtiny,ATmega,Screen,VideoMux hardware;
class KM,SD,Hotspot,AP software;
```
---
## 📁 Repository Structure
* 📁 **`Arduino/`**: Microcontroller firmware written for the Arduino ecosystem.
* `LIN_to_IR/`: Decodes Steering Wheel Module (SWM) buttons from the LIN bus and outputs RC-6 Mode 6A IR commands to control Android. Monitors LIN inactivity to signal shutdown.
* `RTI_Control/`: Drives the serial protocol of the Volvo retractable screen, sending commands to raise the screen, set brightness, and keep it active.
* `IR_remote_test/`: Test firmware for verifying RC-6 IR signal generation.
* 📁 **`Kicad/`**: Schematic, PCB layout, footprints, and Gerber files for a custom Raspberry Pi shield designed to host the MCP2004 LIN transceiver, video muxing, and power routing.
* 📁 **`CAD/`**: SolidWorks 3D CAD design files (`.SLDASM`, `.SLDPRT`) and 3D-printable `.STL` files for the custom mechanical Pi enclosure (`case_top` & `case_bottom`).
* 📁 **`Raspberry/`**: Configuration scripts and mapping files for LineageOS/Android, including custom `ir-keytable` mappings and key event hooks.
* 📁 **`Photos/`**: High-quality hardware builds, installation logs, and system diagrams.
---
## ⚙️ Detailed Module Breakdown
### 1. Steering Wheel Integration (`Arduino/LIN_to_IR`)
The **ATtiny84** intercepts steering wheel buttons from the Steering Wheel Module (SWM) on LIN frame `0x20`. These button actions are translated into bit-banged RC-6 Mode 6A (MCE Remote) signals and fed directly to the Raspberry Pi.
#### Button Map & Command Codes
When buttons are pressed, the ATtiny transmits the corresponding Microsoft MCE remote scancodes:
| Button | LIN Frame Trigger | Active Button Code | MCE Scancode | Action on LineageOS |
| :--- | :--- | :--- | :--- | :--- |
| **UP** | `d0 & 0x01` | `1` | `0x800f041e` | Navigate Up |
| **DOWN** | `d0 & 0x02` | `2` | `0x800f041f` | Navigate Down |
| **LEFT** | `d0 & 0x04` | `3` | `0x800f0420` | Navigate Left |
| **RIGHT** | `d0 & 0x08` | `4` | `0x800f0421` | Navigate Right |
| **ENTER** | `d1 & 0x08` | `5` | `0x800f0422` | Select / OK |
| **BACK** | `d1 & 0x01` | `6` | `0x800f0423` | Back / Exit |
| **Volume Up (Shutdown)** | LIN Silent > 5s | `7` | `0x800f0410` | Trigger Soft Shutdown |
#### Smart Power-down (Car-Off Detection)
To avoid battery drain, the system implements automated shutdown:
* The ATtiny monitors LIN traffic. Since the car's Central Electronic Module (CEM) continuously polls the LIN bus when the ignition is on, active communication indicates the vehicle is running.
* If no LIN serial data is detected for **5 seconds**, the ATtiny assumes the car is off, changes state, and sends the MCE code `0x800f0410` (`KEY_VOLUMEUP`) 3 times to guarantee receipt.
* Android intercepts this key and shuts down cleanly via the command line (`reboot -p`).
---
### 2. Retractable Screen Serial Driver (`Arduino/RTI_Control`)
The Volvo RTI screen requires continuous serial commands at **2400 baud** over a single communication line to stay awake and raised. The screen controller script performs this keep-alive task.
* **Display Modes**: Configurable via display mode hex codes (RGB: `0x40`, PAL: `0x45`, NTSC: `0x4C`, Screen Off/Retract: `0x46`).
* **Brightness Control**: Employs a 16-level hex sequence (`0x20` to `0x2F` / `0x6E`) to adjust the backlighting dynamically.
---
### 3. Raspberry Pi Customization (`Raspberry`)
#### Key Event Remapping
To receive the direct-wired IR signal from the ATtiny, the Pi utilizes `ir-keytable` with a custom mapping profile:
* **Configuration File**: [`Raspberry/rc-rc6-mce.toml`](Raspberry/rc-rc6-mce.toml)
* **Command KeyMapper Setup**:
```bash
# Enable accessibility service for KeyMapper
adb shell settings put secure accessibility_enabled 1
adb shell settings put secure enabled_accessibility_services io.github.sds100.keymapper/.system.accessibility.MyAccessibilityService
# Map the Volume Up trigger to execute:
reboot -p
```
#### Wi-Fi Hotspot Auto-start at Boot
To establish wireless Android Auto on boot, a custom init script starts the Wi-Fi hotspot automatically on startup:
* **Boot script** (`/system/bin/start_hotspot.sh`):
```sh
#!/system/bin/sh
while [ "$(getprop sys.boot_completed)" != "1" ]; do
sleep 1
done
sleep 5
cmd wifi start-softap VolvoC70_AndroidAuto wpa2 123456789
```
* **Init configuration** (`/system/etc/init/start_hotspot.rc`):
```rc
service start_hotspot /system/bin/sh /system/bin/start_hotspot.sh
class main
user root
group root system wifi
oneshot
disabled
on property:sys.boot_completed=1
start start_hotspot
```
---
## 📷 Gallery & Renderings
### System Overview Diagram

### Prototype Hardware



