diff --git a/README.md b/README.md
index a5e0160..b49e829 100644
--- a/README.md
+++ b/README.md
@@ -1,12 +1,146 @@
[ ](https://git.lurenaud.com/lurenaud/VolvoRTI)
-# VolvoRTI
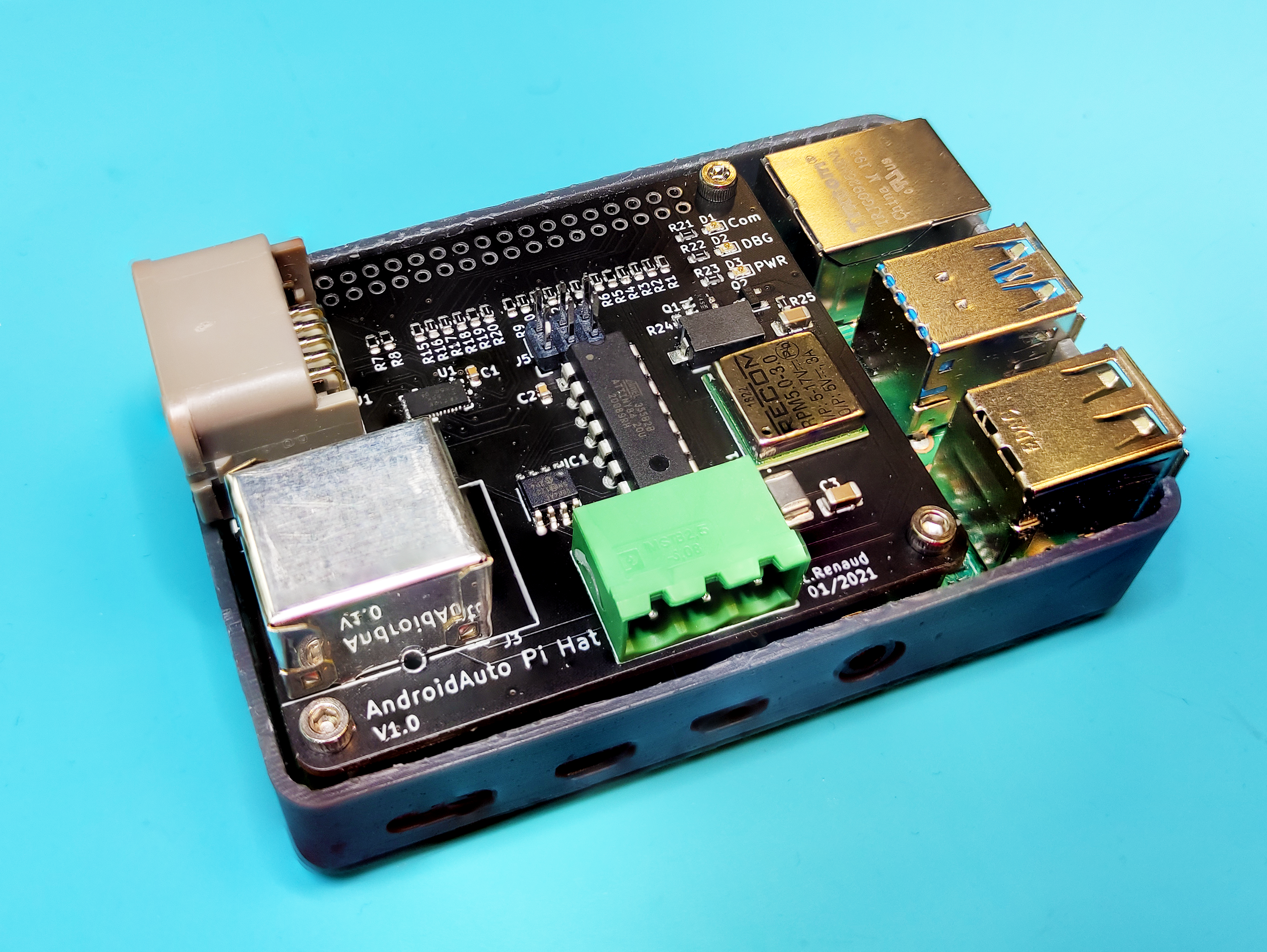
+# VolvoRTI — Android Auto Retrofit for Volvo RTI
-Android-Auto retrofit for Volvo RTI using a Raspberry pi and crankshaft
+An integrated Android Auto retrofit system for the retracting Volvo Road and Traffic Information (RTI) navigation screen. Using a Raspberry Pi 4, custom microcontrollers, custom PCB routing, and 3D-printed mechanical enclosures, this project aims to replace the legacy navigation unit with a modern infotainment hub running LineageOS (Android).
-
](https://git.lurenaud.com/lurenaud/VolvoRTI)
-# VolvoRTI
+# VolvoRTI — Android Auto Retrofit for Volvo RTI
-Android-Auto retrofit for Volvo RTI using a Raspberry pi and crankshaft
+An integrated Android Auto retrofit system for the retracting Volvo Road and Traffic Information (RTI) navigation screen. Using a Raspberry Pi 4, custom microcontrollers, custom PCB routing, and 3D-printed mechanical enclosures, this project aims to replace the legacy navigation unit with a modern infotainment hub running LineageOS (Android).
- -
- +
+
+

+

+
+

+

+