diff --git a/README.md b/README.md
index 6b9782f..5d0f47c 100644
--- a/README.md
+++ b/README.md
@@ -2,8 +2,8 @@
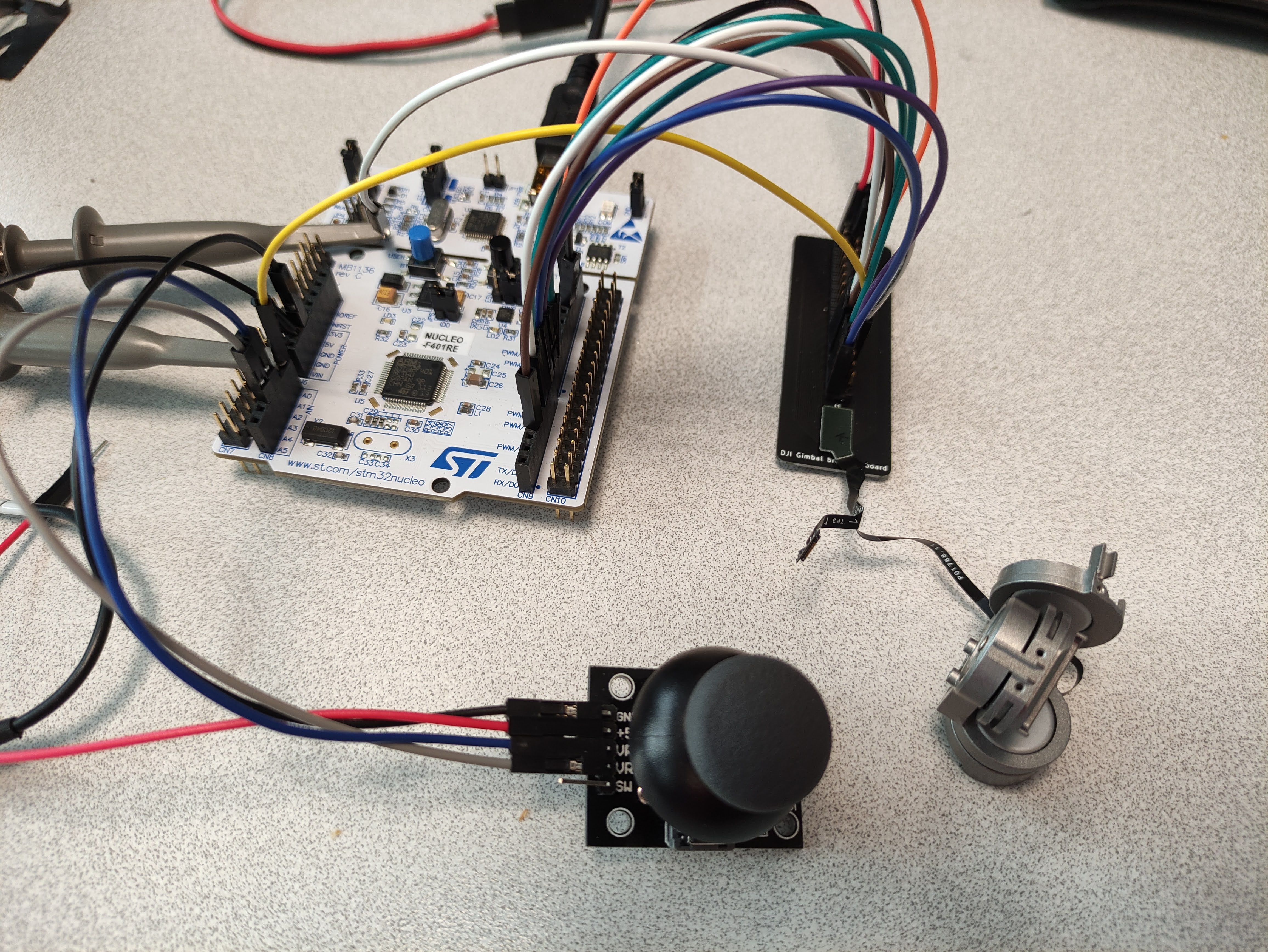
The aim of this project is to be able to use the 3-axis DJI gimbal with a custom open source controller like [SimpleFOC](https://docs.simplefoc.com/). This high quality gimbal is very tiny and easy to find as a replacement part which makes it very suitable for DIY projects.
- -
- +
+ +
+ ## Pinout identification
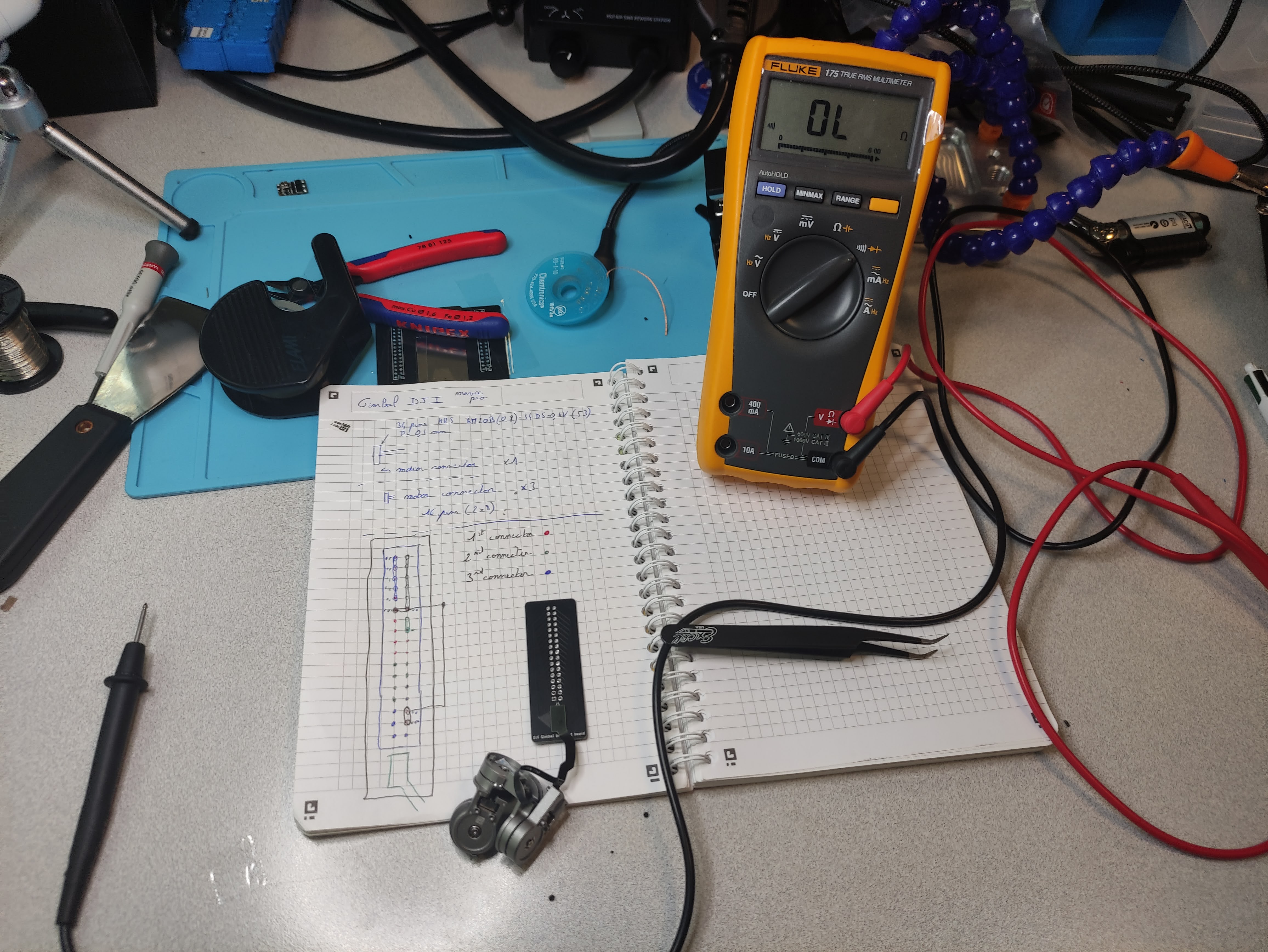
The Gimbal is composed of a flex PCB with a main connector and 3 smaller for each motor. The main end connector is a 40-pin mezzanine board to board connectors. In order to work easily I have designed a breakout board which open to a 2.54" header. (Kicad folder)
@@ -13,7 +13,7 @@ Here is the strategy I followed to find the pinout:
2. Group remaining pins by motor With the multimeter find all the pins connected to the motor connector. (Reapeat 3 times for the other connectors)
-
## Pinout identification
The Gimbal is composed of a flex PCB with a main connector and 3 smaller for each motor. The main end connector is a 40-pin mezzanine board to board connectors. In order to work easily I have designed a breakout board which open to a 2.54" header. (Kicad folder)
@@ -13,7 +13,7 @@ Here is the strategy I followed to find the pinout:
2. Group remaining pins by motor With the multimeter find all the pins connected to the motor connector. (Reapeat 3 times for the other connectors)
-
 +
+
 ### Open-loop control
@@ -31,7 +31,7 @@ Connected directly to a MCU (here a STM32 Nucleo F401RE) and with the Simple FOC
### 1. Setup
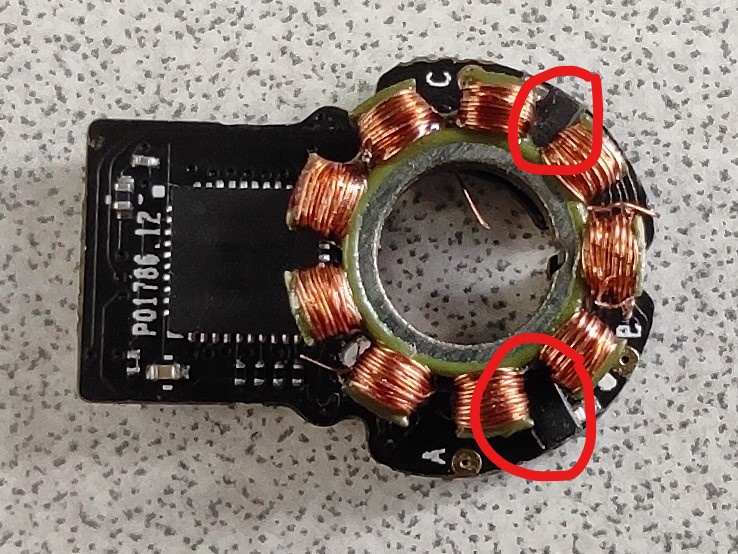
Each motor is composed of two ratiometric linear hall sensors. (Texas Instrument DRV5053 Analog-Bipolar Hall Effect Sensor) They are placed at around 120º from each other (eyes measured) and measure the magnetic field of the rotor.
-
### Open-loop control
@@ -31,7 +31,7 @@ Connected directly to a MCU (here a STM32 Nucleo F401RE) and with the Simple FOC
### 1. Setup
Each motor is composed of two ratiometric linear hall sensors. (Texas Instrument DRV5053 Analog-Bipolar Hall Effect Sensor) They are placed at around 120º from each other (eyes measured) and measure the magnetic field of the rotor.
- +
+ Ratiometric means that the output signal is proportional to the voltage supply to the sensor. In this setup, with 5V supply, the output measured is between 520mV and 1.5V, so a 1V amplitude signal.
@@ -40,7 +40,7 @@ Ratiometric means that the output signal is proportional to the voltage supply t
These oscilloscope traces are the sensor output when rotating the rotor forth and back. (a bit less than 180º on the 3rd motor)
The channel 0 (Yellow) is the Hall 1 and the Channel 1 (Green) is the Hall 2
-
Ratiometric means that the output signal is proportional to the voltage supply to the sensor. In this setup, with 5V supply, the output measured is between 520mV and 1.5V, so a 1V amplitude signal.
@@ -40,7 +40,7 @@ Ratiometric means that the output signal is proportional to the voltage supply t
These oscilloscope traces are the sensor output when rotating the rotor forth and back. (a bit less than 180º on the 3rd motor)
The channel 0 (Yellow) is the Hall 1 and the Channel 1 (Green) is the Hall 2
-
 +
+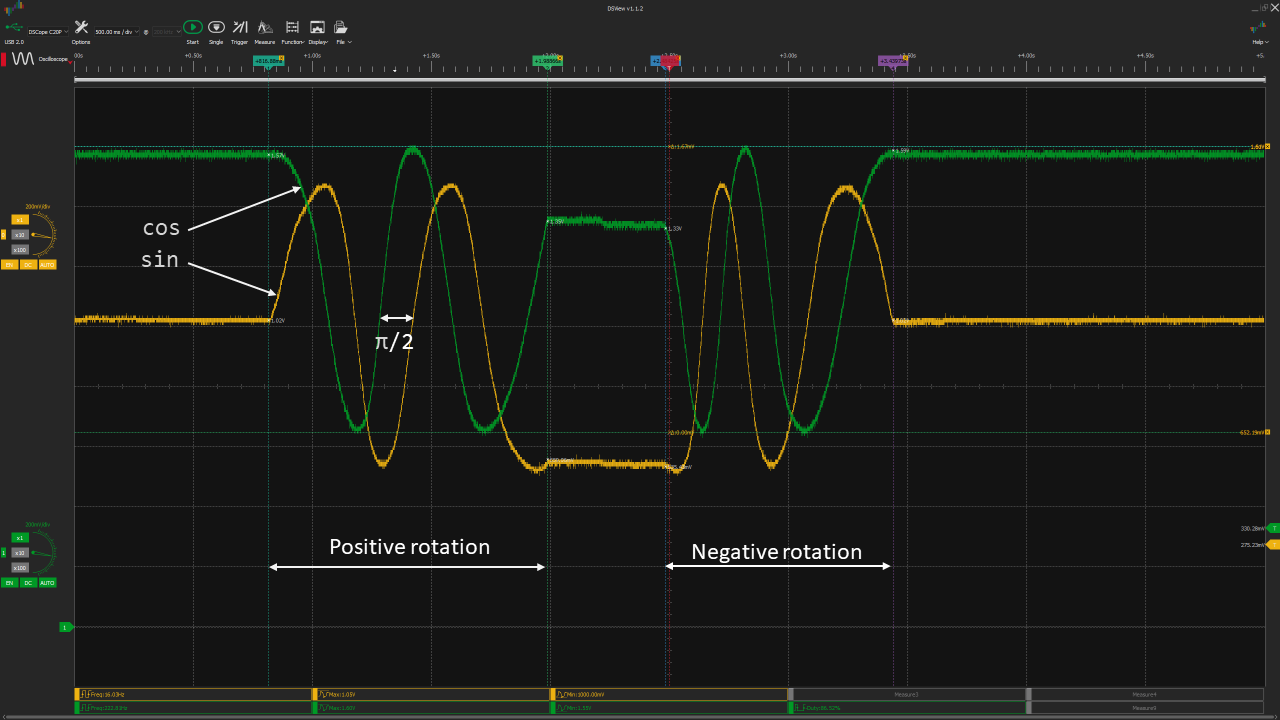
 We can see that in the first movement (positive rotation), the green is out of phase of π/2.`
@@ -102,4 +102,4 @@ To achive position control it is necessary to have first, a velocity controller
However, the motors of the gimbal have hard stop and can only rotate of around a half turn. It was so necessary to remove these mecanical stops. I drilled with a 1.6mm drill the two little holes to remove it. Then the motor was able to rotate freely and PID can be tuned.
-
We can see that in the first movement (positive rotation), the green is out of phase of π/2.`
@@ -102,4 +102,4 @@ To achive position control it is necessary to have first, a velocity controller
However, the motors of the gimbal have hard stop and can only rotate of around a half turn. It was so necessary to remove these mecanical stops. I drilled with a 1.6mm drill the two little holes to remove it. Then the motor was able to rotate freely and PID can be tuned.
-
 +
+
