diff --git a/README.md b/README.md
index 7664641..f9bcf67 100644
--- a/README.md
+++ b/README.md
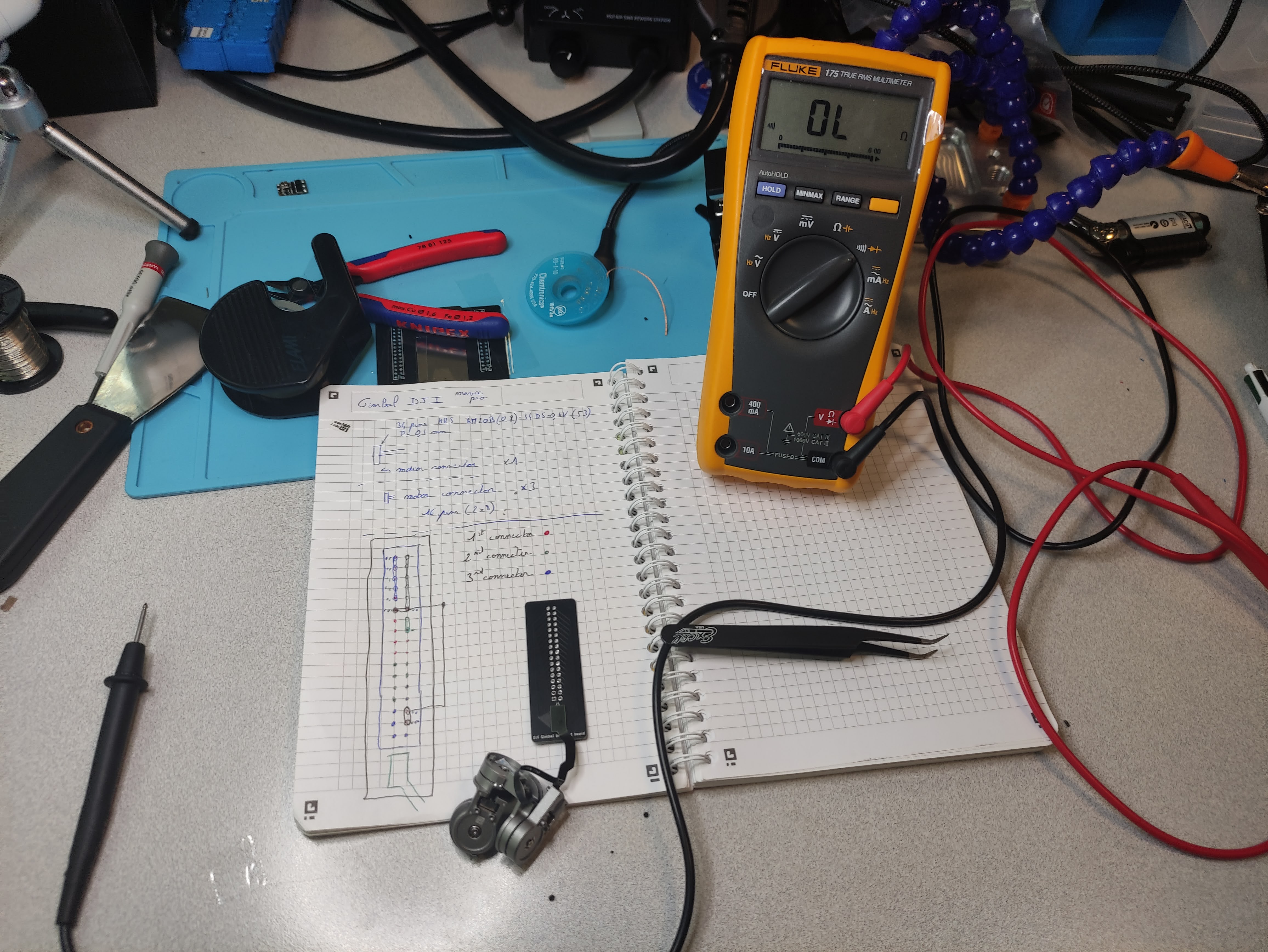
@@ -15,7 +15,7 @@ Here is the strategy I followed to find the pinout:
2. Group remaining pins by motor with the multimeter find all the pins connected to the motor connector. (Reapeat 3 times for the other connectors)
-
 +
### Open-loop control
@@ -107,3 +107,7 @@ To achieve position control it is necessary to have first, a velocity controller
However, the motors of the gimbal have hard stops and can only rotate around a half turn. It was so necessary to remove these mechanical stops. I drilled with a 1.6 mm drill the two little holes to remove it. Then the motor was able to rotate freely and PID can be tuned.
+
### Open-loop control
@@ -107,3 +107,7 @@ To achieve position control it is necessary to have first, a velocity controller
However, the motors of the gimbal have hard stops and can only rotate around a half turn. It was so necessary to remove these mechanical stops. I drilled with a 1.6 mm drill the two little holes to remove it. Then the motor was able to rotate freely and PID can be tuned.

 +
+# Final Result
+
+
+
+# Final Result
+
+